Wir betrachten nun eine Knotenfolge, in der jeder Knoten die maximale
Vielfachheit ![]() besitzt. Es genügt ein einzelnes Intervall mit
besitzt. Es genügt ein einzelnes Intervall mit
![]() -fachen Randknoten zu untersuchen, z.B.
-fachen Randknoten zu untersuchen, z.B.
| (1.10) |
| (1.11) |
 |
(1.12) |
 |
(1.13) |
 |
(1.14) |
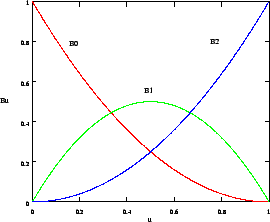
In Abbildung 1.4 sind die quadratischen Bernstein-Polynome dargestellt.
Es gilt
 |
(1.15) |
Die Ableitung eines Bernstein-Polynoms berechnet sich nach der Rekursionsformel
 |
(1.17) |
Mit Hilfe der Bernstein-Polynome lassen sich nun die Bézierkurven definieren.
 |
(1.18) |
Jede Splinekurve (1.9) läßt sich durch Bézierkurven darstellen, indem man in die gegebene Knotenfolge
Wegen (1.16) und
![]() folgt direkt
aus der Definition, daß Bézierkurven immer in der konvexen Hülle
ihrer Kontrollpunkte liegen. Aus den beiden Eigenschaften folgt auch,
daß Bézierkurven affin invariant sind, da baryzentrische
Kombinationen invariant unter affinen Abbildungen sind, d.h. wenn man
eine affine Abbildung auf die Kurve anwendet, erzeugt dies die gleiche
Kurve, wie wenn man die affine Abbildung auf die Kontrollpunkte
anwendet. Eine Bézierkurve ist auch invariant unter einer affinen
Parametertransformation
folgt direkt
aus der Definition, daß Bézierkurven immer in der konvexen Hülle
ihrer Kontrollpunkte liegen. Aus den beiden Eigenschaften folgt auch,
daß Bézierkurven affin invariant sind, da baryzentrische
Kombinationen invariant unter affinen Abbildungen sind, d.h. wenn man
eine affine Abbildung auf die Kurve anwendet, erzeugt dies die gleiche
Kurve, wie wenn man die affine Abbildung auf die Kontrollpunkte
anwendet. Eine Bézierkurve ist auch invariant unter einer affinen
Parametertransformation
![]() , d.h. es
gilt
, d.h. es
gilt
 |
(1.19) |
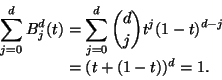
Weiter erhält man sofort aus der Definition der Bernstein-Polynome, daß
| (1.20) |
 |
(1.21) |
Es gilt auch
![]() und
und
![]() , da
, da
![]() und
und
![]() wobei
wobei
![]() das
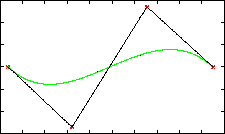
Kroneckersymbol bezeichnet. Damit interpolieren die Bézierkurven
immer den Anfangs- und Endpunkt des Kontrollpolygons. Weiter gilt
auch, daß die Richtung der Tangente der Kurve in
das
Kroneckersymbol bezeichnet. Damit interpolieren die Bézierkurven
immer den Anfangs- und Endpunkt des Kontrollpolygons. Weiter gilt
auch, daß die Richtung der Tangente der Kurve in ![]() und
und ![]() der
Richtung der ersten Strecke des Kontrollpolygons von
der
Richtung der ersten Strecke des Kontrollpolygons von ![]() nach
nach ![]() bzw. der letzten Strecke von
bzw. der letzten Strecke von ![]() nach
nach ![]() entspricht.
entspricht.
Man kann weiter zeigen, daß gilt
 |
(1.22) |
Das Bernstein-Polynom ![]() besitzt nur ein Maximum an der Stelle
besitzt nur ein Maximum an der Stelle
![]() , d.h. wenn wir nur einen Kontrollpunkt
, d.h. wenn wir nur einen Kontrollpunkt ![]() ändern,
ist die Änderung der Kurve im Bereich des Parameterwertes
ändern,
ist die Änderung der Kurve im Bereich des Parameterwertes
![]() am stärksten. Dadurch werden die Auswirkungen von
Änderungen vorhersehbar und vor allem ändert sich der Verlauf der
Kurve nur in einem lokal beschränkten Bereich.
am stärksten. Dadurch werden die Auswirkungen von
Änderungen vorhersehbar und vor allem ändert sich der Verlauf der
Kurve nur in einem lokal beschränkten Bereich.