I Khalid, CA Weider, EA Jonckheere, SG Shermer, FC Langbein. Sample-efficient Model-based Reinforcement Learning for Quantum Control. Phys. Rev. Research 5, 043002, 2023.
[DOI:10.1103/PhysRevResearch.5.043002]
[arXiv:2304.09718]
[PDF]
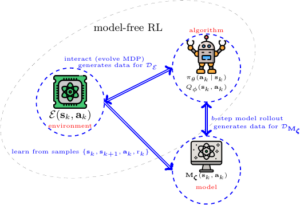
We propose a model-based reinforcement learning (RL) approach for noisy time-dependent gate optimization with improved sample complexity over model-free RL. Sample complexity is defined as the number of controller interactions with the physical system. Leveraging an inductive bias, inspired by recent advances in neural ordinary differential equations (ODEs), we use an auto-differentiable ODE parametrised by a learnable Hamiltonian ansatz to represent the model approximating the environment whose time-dependent part, including the control, is fully known. Control alongside Hamiltonian learning of continuous time-independent parameters is addressed through interactions with the system. We demonstrate an order of magnitude advantage in the sample complexity of our method over standard model-free RL in preparing some standard unitary gates with closed and open system dynamics, in realistic numerical experiments incorporating single shot measurements, arbitrary Hilbert space truncations and uncertainty in Hamiltonian parameters. Also, the learned Hamiltonian can be leveraged by existing control methods like GRAPE for further gradient-based optimization with the controllers found by RL as initializations. Our algorithm, that we apply to nitrogen vacancy (NV) centers and transmons, is well suited for controlling partially characterized one- and two-qubit systems.
![]() This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.